
Začínáme automatizací procesů pomocí robotů SCARA – Panelová montážní robotická buňka – SW-BA
SW-BA je součástí řady malých kloubových robotů Fuji SmartWing, které umožňují automatizovat různé procesy ve výrobě. SW-BA je balíčkové řešení robotické buňky, které zahrnuje funkce potřebné pro procesy panelové montáže.

Začínáme se snadno použitelnou robotickou buňkou pro panelovou montáž – SW-BA
Desky plošných spojů používané v automobilech a domácích spotřebičích procházejí následujícími procesy: "přejímka dílů", "povrchová montáž", "osazení" a "montáž a balení", než jsou připraveny k expedici.
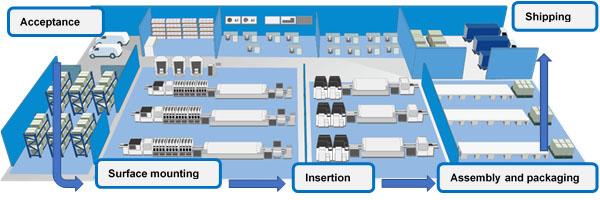
Z těchto procesů zaznamenal proces povrchové montáže značný pokrok v automatizaci díky vývoji pick and place strojů (montérů čipů) a periferních zařízení. Proces vkládání při manipulaci s olověnými součástkami nepravidelného tvaru, jako jsou konektory a hliníkové elektrolytické kondenzátory, se však stále provádí ručně vzhledem k tomu, že tyto součástky jsou dodávány v obalech s volným obsahem a množství vkládaných součástek je relativně malé. Stále tedy existují problémy, které je třeba řešit, pokud jde o kvalitu a produktivitu.
Abychom vyřešili problémy s kvalitou a produktivitou, s nimiž se při vkládání potýká mnoho našich zákazníků, zabalili jsme roboty SCARA a systémy vidění do cenově výhodné a snadno použitelné robotické buňky SW-BA.
Hlavní rysy SW-BA jsou následující.
- Kompatibilita se širokou škálou dílů pouhým výběrem standardizovaných periferních jednotek.
- Možnost dodávat z volně loženého materiálu nebo pomocí jednoduchých zásobníků, aniž by bylo nutné přecházet na jiné obaly.
- Každý může snadno vytvářet výrobní programy pomocí číselného zadávání a intuitivního, snadno pochopitelného grafického rozhraní.
- Konfigurace Robot Cell bez rozdílů mezi jednotlivými stroji umožňuje snadné nastavení, přemístění a rozšíření systému do dalších továren.
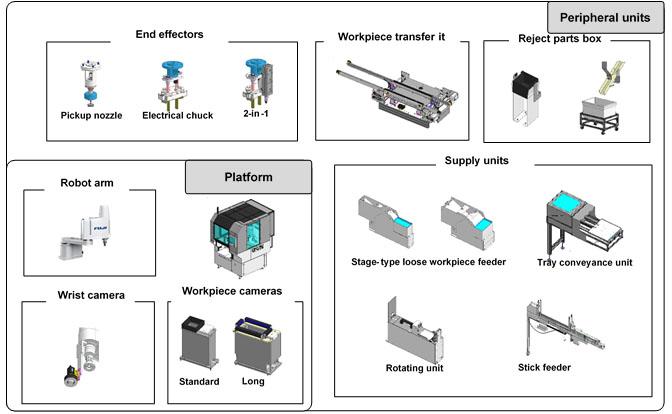
Platforma SW-BA se skládá z robota SCARA s užitečným zatížením 6 kg a dosahem 700 mm a ze dvou typů kamer pro rozpoznávání dílů: zápěstní kamery připevněné na špičce ramene robota a kamery obrobku připevněné na základně.
Zápěstní kamera rozpoznává polohu panelu při zatížení a polohu pro vyzvednutí dodaných dílů. Kamera obrobku rozpoznává tvar dílu, polohu a rozteč zasouvacích kolíků a směr dílu pomocí rozpoznávání obrazu spodní strany dílu. Automatizace vkládacích prací, které vyžadují přesnost, je realizována využitím informací o rozpoznávání obrazu získaných z těchto dvou kamer a korekční technologie ve spolupráci s ramenem robotu.
Standardně je připravena řada periferních jednotek, jak ukazuje obrázek níže. Nastavení systému pro stroj se provádí jednoduše výběrem jednotlivých jednotek podle dílů, které se mají vkládat.
Automatizace procesu vkládání bez nutnosti měnit dodávaný obal.
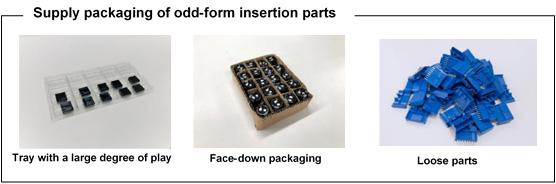
Vkládané díly nepravidelného tvaru se často dodávají volně nebo v zásobnících, které mají velkou vůli.
Pro automatizaci vkládání těchto dílů je obvykle nutné je přendat do speciálních zásobníků, což brání zvyšování míry automatizace.
SW-BA rozpoznává celý prostor pro zásobování díly pomocí zápěstní kamery. To umožňuje přesný odběr ve středu dílu, i když je díl dodáván v zásobníku s velkou vůlí ve vaničkách. U hromadně dodávaných dílů lze pomocí rozpoznávání obrazu rozpoznat více obrobků na zásobovacím stupni podavače volně ložených dílů a odebírat pouze ty obrobky, které se nacházejí v poloze, z níž je možné je odebrat.
Tyto funkce umožňují přímé zásobování a automatické vkládání obrobků bez nutnosti výměny obalu, a to i v případě, že jsou obrobky dodávány volně.
Nevyžadují se žádné odborné znalosti výuky ani programování. Každý může snadno vytvářet výrobní programy.
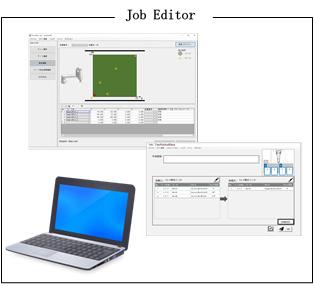
K vytváření výrobních programů slouží nástroj Job Editor.
Job Editor umožňuje uživateli vytvářet výrobní programy jednoduchým zadáním číselných hodnot pro "informace o obrobku" (informace o tvaru obrobku), "informace o panelu" (informace o souřadnicích zasunutí) a "informace o podávání obrobku" (informace o poloze odebírání obrobku) nebo jejich výběrem z rozbalovací nabídky na počítači s nainstalovaným Job Editorem. Není nutné provádět školení, která se používají u typických robotů SCARA.
Tvarová data se vytvářejí pomocí editoru Shape Editor, který je dodáván se strojem. Nejprve postupujte podle grafického rozhraní programu Shape Editor a zadejte hodnoty nastavení. Poté se obrobek zobrazí na stroji a z pořízeného snímku skutečného dílu se automaticky extrahuje barva obrobku a pozadí, obrys a tvar hrotů zasouvacích kolíků. Nakonec se obraz obrobku ohraničí obdélníkem, čímž se dokončí vytváření tvarových dat.
Pomocí programů Job Editor Shape Editor lze provádět doplňky a změny bez odborných znalostí nebo programování.

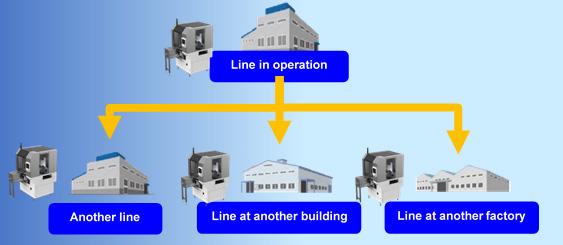
Konfigurace Robot Cell bez rozdílů mezi jednotlivými stroji, což usnadňuje nastavení, přemístění a rozšíření systému do dalších továren.
SW-BA lze používat jako samostatný stroj, přičemž mezi jednotlivými roboty nejsou žádné rozdíly, protože se využívá styl konfigurace "buňky". To znamená, že stejný program lze použít k rozšíření výroby nejen na nová zařízení, ale i na nové instalace kopírovaných linek, což umožňuje spustit výrobu v krátkém čase.
Díky těmto vlastnostem lze SW-BA použít nejen pro automatizaci procesů vkládání, ale také na dalších různých místech a v různých aplikacích ve výrobním závodě, jako jsou procesy předpřípravy pro distribuci požadovaného množství dílů a automatizace dílčích montážních procesů před hlavní montáží.
Výše uvedené je úvodem k tomu, jak začít v malém s automatizací procesů vkládání pomocí panelové montážní robotické buňky - SW-BA.
Chcete-li získat více informací, neváhejte nás kontaktovat.

